Системы движения и привода
В этой статье я
хочу рассмотреть простейшие системы привода устройств в движение. Здесь не
ставится задача рассмотреть всевозможные виды привода, а кратко ознакомиться с
самыми распространенными из них.
Соленоид - представляет
собой электромеханическое устройство, которое преобразует электрическую энергию
в механическую (совершает возвратно-поступательные движения). Соленоид состоит
из обмотки с проводом и металлического подвижного сердечника. Пропустив ток через
обмотку соленоида, металлический сердечник втягивается внутрь катушки.
Разомкнув цепь, пропадет сила удерживающая сердечник внутри катушки. Внешний
вид соленоида представлен на рисунке ниже.
Шаговый
двигатель – бесщёточный синхронный электродвигатель вращение, которого
осуществляется порционно, на определенный угол. Как правило, у шагового
электродвигателя несколько обмоток, подав напряжение на одну из них, ротор
поворачивается и фиксируется в определенном положении. Затем запитывается
следующая обмотка, ротор поворачивается и снова фиксируется. И так далее. Есть несколько
режимов управления шаговым двигателем: однофазный, двухфазный, полушаговый и
микрошаговый. Каждый обладает своими достоинствами и недостатками. ШД могут
быть использованы в качестве обычных двигателях, могут управлять рулевыми механизмами,
выступать в роли механизмов для позиционирования. Например позиционер
спутниковой антенны на AT89C2051. Мало какие принтеры могут
обойтись без шаговых электродвигателей.
Шаговые
двигатели сами по себе уникальны. Они управляются с помощью цифровых кодов,
способны выполнить точно заданное число шагов, незаменимы там, где нужна
вымокая точность. Промышленностью выпускаются большее число наименований этих
приборов с самыми разнообразными характеристиками.

Сервомоторы –
это электродвигатели постоянного тока, которые помимо редукторов имеют систему обратной
связи, контролирующую положение вала. Вал может поворачиваться на угол ±90о
или фиксироваться в определенном положении. В любительских целях
сервомоторы используются в качестве контроля положения органов управления. Сервомоторы
находятся в среднем ценовом диапазоне. Для знакомства с робототехникой и
создания первых конструкций это неприемлемо, поэтому в дальнейшем будет
рассмотрен метод создания заменителей сервомоторов из подручных и доступных
материалов. 
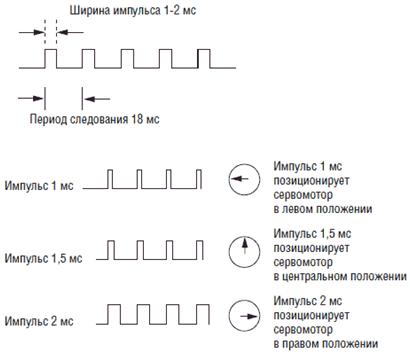
У сервомотора
три вывода, на два из них подают питающее напряжение, третий – сигнальный.
Сигнал состоит из цепочки импульсов прямоугольной формы длительностью от 1 до 2
мс. За среднее положение отвечает импульс длительностью 1,5 мс. Импульсы
поступают с частотой 50 Гц. Импульс длительностью 1 мс вызывает поворот до
упора влево, а импульс длиной в 2 мс поворачивает вал до упора вправо. Изменяя
длительность импульса от 1 до 2мс можно поворачивать вал на необходимый угол
внутри рабочего диапазона. Ниже представлена схема управляющих импульсов
сервомотора.
Двигатели постоянного тока –
это один из самых распространенных приводов в электронике. Для большинства этих
двигателей характерны небольшой крутящий момент и высокая частота вращения
ротора. Почти всегда в конструкциях необходим высокий момент при низких
оборотах. С этой задачеq могут справиться редукторы, которые за счет зубчатой
передачи преобразуют высокие обороты в высокий момент. Редукторы характеризуются
передаточным числом – это отношение входной скорости к скорости на выходе.
Причем изменение момента обратно пропорционально изменению скорости (необходимо
учесть, что КПД любой системы не равно 100%)
| 









